Robust Visual Pattern Analysis
The objective of this research is the development of a mathematical framework that enables the identification, characterization and matching of patterns in imaging data with certain guarantees. The application areas for this project include medical imaging, autonomous driving systems, and segmentation of natural and biological images. This work has been partially funded by the NSF under award CNS-1239323.
Publications:
- Q. Ge and E. Lobaton, “Obstacle Detection in Outdoor Scenes based on Multi-Valued Stereo Disparity Maps,” IEEE Symp. Series on Computational Intelligence (SSCI), 2017.
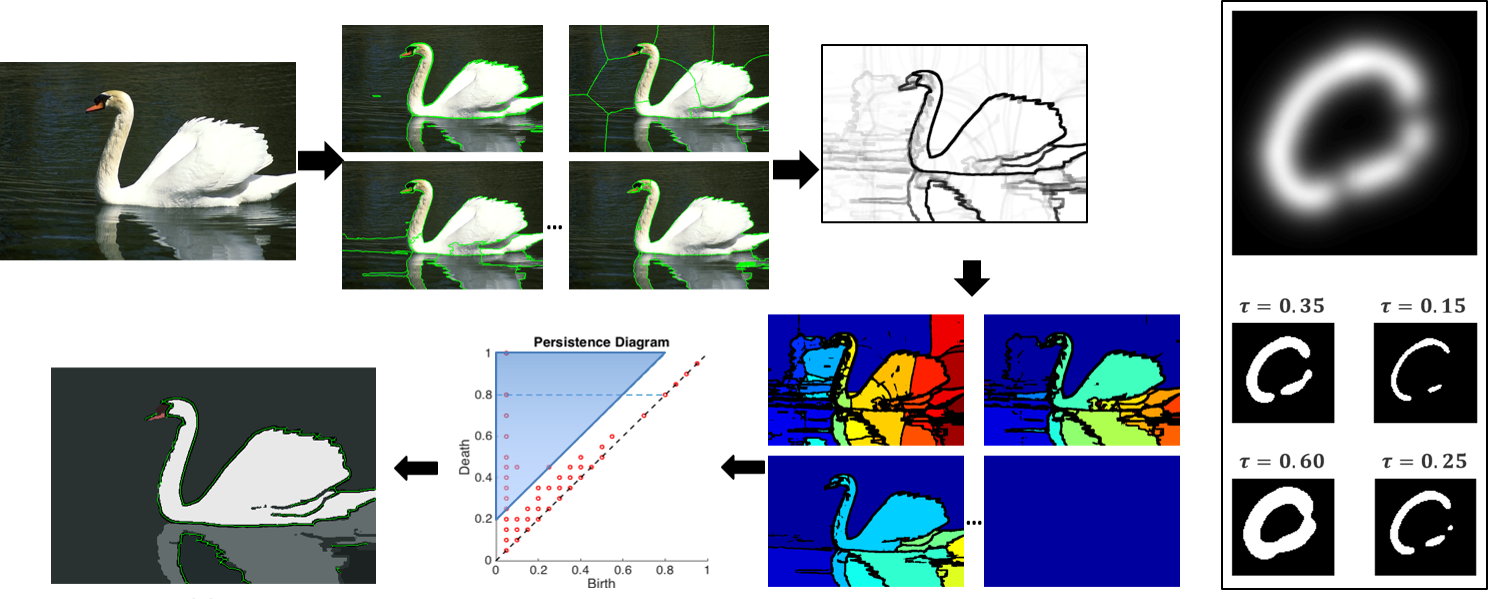
- Q.Ge and E. Lobaton, “Consensus-Based Image Segmentation via Topological Persistence,” Intl. Workshop on Differential Geometry in Computer Vision and Machine Learning (DIFF-CVML) at CVPR, 2016.
- S. Chattopadhyay, Q. Ge. C. Wei and E. Lobaton, “Robust Multi-Target Tracking in Outdoor Traffic Scenarios via Persistence Topology based Robust Motion Segmentation,” IEEE Global Conf. on Signal and Information Processing (GlobalSIP), 2015.
- C. Wei, “Driver Assistant System: Robust Segmentation based on Topological Persistent Analysis and Multi-target Tracking based on Dynamic Programming,” Masters NCSU, 2014
- C. Wei, Q. Ge, S. Chattopadhyay, and E. Lobaton, “Robust Obstacle Segmentation based on Topological Persistence in Outdoor Traffic Scenes,” IEEE Symposium Series on Computational Intelligence (SSCI), 2014.
- Q. Ge, N. Lokare, and E. Lobaton, “Non-Rigid Image Registration under non-Deterministic Deformation Bounds,” Intl. Symposium on Medical Information Processing and Analysis (SIPAIM), 2014.