by Admin Admin | Sep 27, 2012 | Completed
Project Description:
Intelligent space is a concept which fuses global information using sensors and actuators to take intelligent operational decisions for applications like robot navigation, tele-operation, remote surgery, manufacturing plant monitoring etc. iSpace Concept
ADAC lab has developed a prototype of iSpace as a network based integrated navigation system which is a subset of network based multi sensor multi-large scale actuator mechatronic systems. This whole system is used a research platform for many research topics such as network based control systems, path planning for robot navigation, bandwidth allocation, scheduling, network security, collaborative control.
The focus of this research is path planning navigation for the unmanned ground vehicle in a network based navigation system. Details of the project and the implementations can be found in the dcument section.
Edge Detection
Harmonic Potential Field
Path Planning
Documentations
by Admin Admin | Sep 27, 2012 | Completed


Project Description:
In this project a predictive gain scheduler for robot path tracking control in a networked control system with variable delay is being developed. The controller uses the plant model to predict future position and find the amount of travel possible with the global path as a constraint. Based on variable network conditions and vehicle trajectory’s curvature the vehicle is allowed to travel farther with the same control input as long as the vehicle trajectory matches the path constraint. With this method path specific characteristics are used to evaluate the effectiveness of each generated control signal. By scheduling the gain on the control signal the vehicle tracking performance is maintained with an increase in network delay. The tracking time is decreased compared to other methods since the proposed control method allows controller to look farther down the path to evaluate predicted effect of each control signal before scaling it.
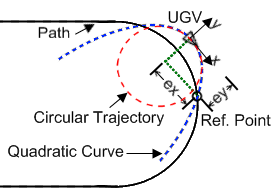
The gain scheduling middleware concept can be illustrated using the diagram below. When controlling a remote system over a network the delay caused by the network affects both the control signal and the feedback signal. When feedback arrives at the controller the feedback signals have been delayed by the network. The feedback preprocessor compensates for this by using the remote system model to predict what the feedback values will be when the next control value arrives. This preprocessed, predicted feedback is used by the controller to generate control commands. In this project the controller is a quadratic curve path tracker.

The control signal is then scaled using a gain table based on certain system parameter such as network delay and path curvature. In predictive constrained gain scheduling the composition of this gain table is uniquely tuned to increase path tracking performance.
Predictive Constrained Motion
When a UGV is tracking a path the motion of the UGV is predicted using the control value and the UGV model. The predicted position is calculated iteratively until the UGV prediction exits a safety region defined around the path. The point where the UGV exits the safety region is the point where the control value loses it’s effectiveness. The predicted position, which is constrained by the future path, is then used to determine how far the UGV is allowed to travel before it needs to get an updated control signal. This distance is then used as another parameter in gain scheduling allowing the UGV to travel further.


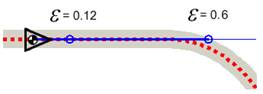
When the UGV is allowed to travel further the epsilon value increases. A gain table for scaling control signals is computed for the epsilon value so that the UGV is allowed to travel a distance of epsilon. The gain table will decrease the control signal such that the UGV will not begin to deviate from the path while tracking complex paths with network delay. Several gain tables for different epsilon values can be seen below.


by Admin Admin | Sep 27, 2012 | Current

Intelligent Space (iSpace) is a relatively new concept to effectively use distributed sensors, actuators, robots, computing processors, and information technology over communication networks. iSpace is a large scale Mechatronics System by integrating sensors, actuators, and control algorithms in a communication system using knowledge from various engineering disciplines such as automation, control, hardware and software design, image processing, communication and networking.
Documentations
by Admin Admin | Sep 27, 2012 | Completed

Within the next 5 years, there will be a significant increase in the number of plug-in hybrid electric vehicles (PHEVs) and plug-in electric vehicles (PEVs). Since these vehicles utilize grid power for charging, this growth could pose potential threats and benefits for the existing power grid. The main challenge is that when a large number of PHEVs/PEVs simultaneously connect to the grid, the overall power system quality and stability can be severely affected due the large amount of power consumption. The addition of PHEVs and PEVs into our society is an exciting view into the future of electric vehicles, but the power grid must be able to support these new vehicles. By smartly controlling their charging process, the utility can utilize the flexible nature of these loads for peak shaving and valley filling to improve the quality of power. Since these vehicles also have the potential to transfer power back into the grid when it is needed (i.e., when the demand for power is high), a more robust power grid, or ‘smart grid’, is needed.
This project deals project with the pros and cons of PHEVs/PEVs by formulating optimization problems that consider power grid stability and customer satisfaction concurrently through proper choice of the cost function and equality and inequality constraints. Two main approaches are then considered for online, real-time solutions of these optimization problems:
- Centralized Approach: In this approach, the information regarding the charging process of vehicles such as SoC, Energy Cost, Time of Stay, Available Power and etc. is sent to a central control unit, which based on power system stability and customer satisfaction allocates the charging powers to the vehicles for each time step. Various algorithms such as Particle Swarm Optimization (PSO), Auction Theory and Estimation of Distributed Algorithms (EDA) are used to deal with the nonlinear and large scale nature of the problem.
- Distributed Approach: In this approach the central unit is eliminated and charging stations cooperatively find the optimal power allocations by exchanging information among each other. This approach is highly efficient in terms of computational and communicational effort, considering that the overall optimization problem is large scale and nonlinear.
To demonstrate our algorithms, we have developed a digital testbed for a large-scale PHEV/PEV parking deck in Matlab/Simulink and Labview. This testbed is able to show a reliable two-way communication system between all the parties involved. This includes vehicles, charging stations, and the Intelligent Energy Management System (iEMS). Communication can occur through both the Internet and the ZigBee network. We then use Monte Carlos simulation to evaluate the effectiveness of our algorithms.
Documentations
-
“A Digital Testbed for a PHEV/PEV Enabled Parking Lot in a Smart Grid Environment“, 2012 Innovative Smart Grid Technologies Conference (ISGT 2012), Washington D.C., U.S.A., Jan 18, 2012
-
“Performance Optimization of a PHEV/PEV Enabled Municipal Parking Deck in a Smart Grid Environment“, 2011 IEEE Power and Energy Society General Meeting, Detroit, Michigan, U.S.A., July 24, 2011
-
“Investigating a Large-scale PHEV/PEV Parking Deck in a Smart Grid Environment“, 43rd North American Power Symposium, Boston, MA, August 4-6, 2011
-
“Microgrid Planning and Operation: Solar Energy and Wind Energy“, 2010 IEEE Power and Energy Society General Meeting, Minneapolis, Minnesota, U.S.A. July 25, 2010
-
“ An Intelligent Energy Management System for Charging PHEVs Considering Demand Response,” 2010 FREEDM Annual Conference, Tallahassee, Florida, U.S.A, May 18, 2010
Links
by Admin Admin | Sep 27, 2012 | Completed

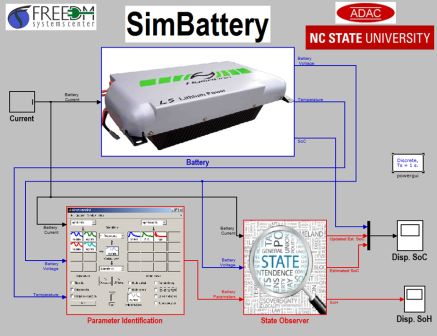
The recent acceleration of the battery technology, due to emergence of smart grid and electric vehicle (EV) applications, has increased the demand for advanced battery management systems (BMS). State of charge (SOC) and State of health (SOH) estimation are two of the main features of the BMS. Although there have been several attempts to estimate the battery states, the results do not have enough accuracy to satisfy sensitivity analysis criteria for reliability assessment and energy efficiency purposes. The goal of this project is to develop algorithms to estimate the State of Charge (SOC) and State of Health (SOH) of the battery accurately in these applications.
Considering an RC equivalent circuit to model the battery dynamics, we design an adaptive on-line parameters/SOC/SOH co-estimation algorithm that identifies different parameters of the battery model at various temperature, ageing, SOC and charging/discharging rate conditions. This model with updating parameters is used to estimate the SOC with compensating the initial SOC error, accumulative error and noise effect. The estimated SOC and the updating model are also utilized to estimate the full capacity and internal resistance of the battery. This information along with the statistical data regarding the application and the battery performance degradation are deployed to predict the remaining useful life (RUL) and end of life (EOL) as indicators of the battery SOH.
Publication
- Rahimi-Eichi and M.-Y. Chow, “Batteries,” in Handbook of Energy, G. M. Crawley, Ed., ed USA, World Scientific Publishing Company and Imperial College Press, 2012.
- Rahimi-Eichi, F. Baronti, and M. Y. Chow, “Online Adaptive Parameter Identification and State-of-Charge Coestimation for Lithium-Polymer Battery Cells,” Industrial Electronics, IEEE Transactions on, vol. 61, pp. 2053-2061, 2014.
- Rahimi-Eichi, U. Ojha, F. Baronti, and M. Chow, “Battery Management System: An Overview of Its Application in the Smart Grid and Electric Vehicles,” Industrial Electronics Magazine, IEEE, vol. 7, pp. 4-16, 2013 (Best Paper Award).
- Otero, H. Rahimi-Eichi, J. J. Rodriguez-Andina, M.-Y. Chow, “FPGA Implementation of an Observer for State-of-Charge Estimation in Lithium-Polymer Batteries”, presented at IEEE International Conference on Mechatronics and Control (ICMC), Jinchou, China, 2014 (Best paper award).
- Rahimi-Eichi, B. Balagopal, M.-Y. Chow, and T.-J. Yeo, “Sensitivity Analysis of Lithium-Ion Battery Model to Battery Parameters,” presented at the 39th Annual Conference of the IEEE Industrial Electronics Society (IECON2013), IEEE, Vienna, Austria, 2013.
- Baronti, W. Zamboni, N. Femia, H. Rahimi-Eichi, R. Roncella, S. Rosi, et al., “Parameter identification of Li-Po batteries in electric vehicles: A comparative study,” presented at the IEEE International Symposium on Industrial Electronics (ISIE2013), pp. 1-7, Taipei, Taiwan, 2013.
- Rahimi-Eichi and M.-Y. Chow, “Adaptive online battery parameters/SOC/capacity co-estimation,” presented at the Transportation Electrification Conference and Expo (ITEC2013), IEEE, pp. 1 – 6, Metro Detroit, Michigan, USA, 2013.
- Rahimi-Eichi and M.-Y. Chow, “Adaptive parameter identification and State-of-Charge estimation of lithium-ion batteries,” presented at the 38th Annual Conference on IEEE Industrial Electronics Society (IECON 2012), IEEE, pp. 4012 – 4017, Montreal, QC, Canada, 2012.
- Rahimi Eichi and M.-Y. Chow, “Modeling and analysis of battery hysteresis effects,” presented at the Energy Conversion Congress and Exposition (ECCE2012), IEEE, pp. 4479-4486, Raleigh, NC, USA, 2012.
- Rahimi-Eichi, F. Baronti, and M. Y. Chow, “Modeling and online parameter identification of Li-Polymer battery cells for SOC estimation,” presented at the International Symposium on Industrial Electronics (ISIE2012), IEEE, pp. 1336-1341, Hangzhou, Zhejiang, China, 2012.
Links





{kind=link}
{kind=link}