Cyborg Insect Networks
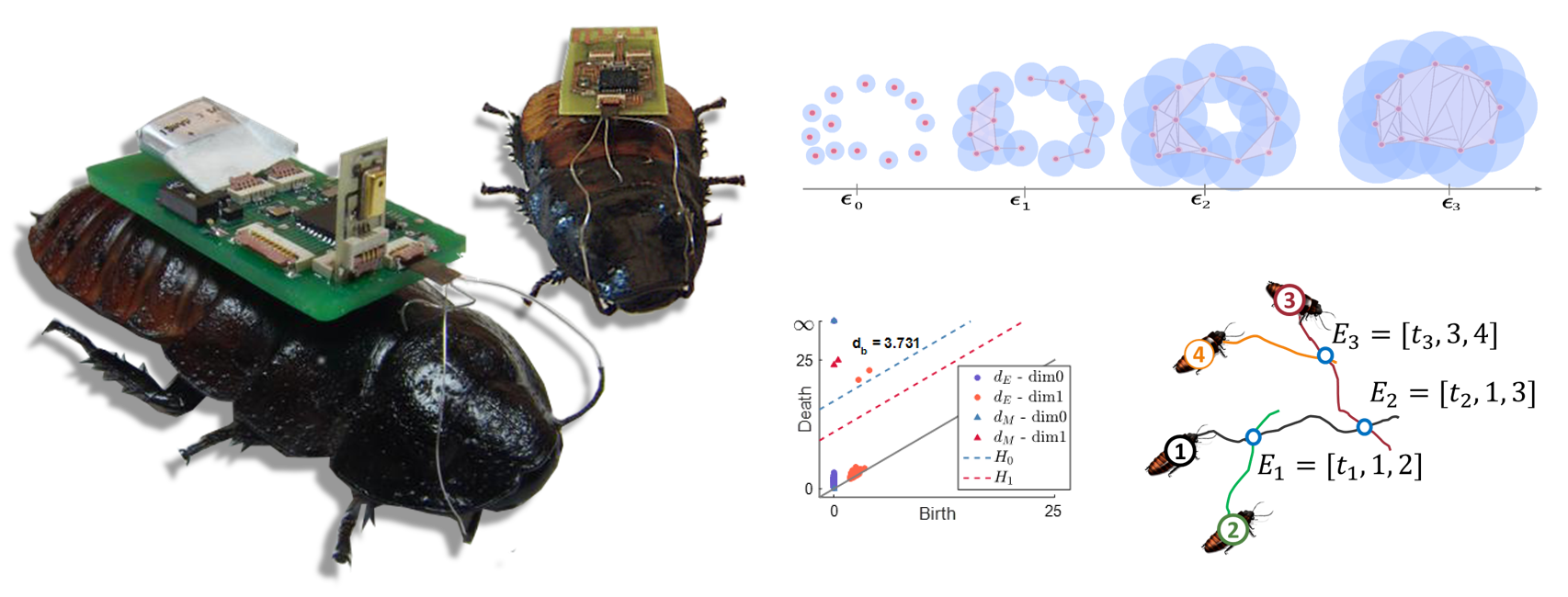
Current technology falls short in offering mobile robotic agents that function effectively under complex, nonhomogenous, and under-rubble environments emerging after for example a natural disaster. Insects, on the other hand, exhibit an unmatched ability to navigate through a variety of environments via efficient locomotion. This project aims to develop algorithms for data aggregation and control of biobotic insect networks consisting of cybernetic Madagascar hissing cockroaches, called “biobots”.
Our system combines biological and synthetic sensors, wireless networking, mapping and localization, and motion planning. We study the behavior and motion models of normal and biobotic insects, exploiting their natural behavior to develop algorithms and software for the estimation of geometric and topological maps of unknown environments where global localization and mapping techniques fail. Topological data about the environment is supplemented with inertial, magnetic, acoustic, and signal strength information for the localization of the biobots. Furthermore, algorithms that combine cockroaches and aerial agents are considered to explore and map larger and more complex environments. We demonstrate the feasibility and performance of our algorithms by conducting experiments on our own robotic platform (WolfBots) as well as miniature robotic insects such as the Hexbug. Field testing is performed using hissing cockroaches controlled with embedded chips.
This work is done in collaboration with the iBionicS lab (NCSU), the WALAN Lab (NCSU) and the Hedrick Lab (UNC) under the support of NSF award CNS-1239243 (Aug 2012 – Dec 2016).
Resources
- Biobot Behavior Analysis – Paper: “Biobotic Motion and Behavior Analysis in Response to Directional Neurostimulation,” ICASSP 2017
- Dynamic Topological Mapping: Hexbugs Video – Paper: “A Framework for Mapping with Biobotic Insect Networks: From Local to Global Maps,” RAS Journal 2016
- Dynamic Topological Mapping: Simulation Video – Paper: “A Framework for Mapping with Biobotic Insect Networks: From Local to Global Maps,” RAS Journal 2016
- Static Topological Mapping: WolfBots Video – Paper: “Mapping of Unknown Environments using Minimal Sensing from a Stochastic Swarm,” IROS 2014
- Static Topological Mapping: Simulation Video – Paper: “Topological Mapping of Unknown Environments using an Unlocalized Robotic Swarm,” IROS 2013
Publications
- J. Cole, T. Agcayazi, T. Latif, A. Bozkurt, E. Lobaton, “Speed Estimation based on Gait Analysis for Biobotic Agents,” IEEE Sensors Conf., 2017.
- J. Cole, F. Mohammadzadeh, C. Bollinger, T. Latif, A. Bozkurt, E. Lobaton, “A Study on Motion Mode Identification for Cyborg Roaches,” Intl. Conf. on Acoustics, Speech and Signal Processing (ICASSP), 2017.
- A. Dirafzoon, T. Latif, F. Gong, M. Sichitiu, A. Bozkurt, E. Lobaton, “Biobotic Motion and Behavior Analysis in Response to Directional Neurostimulation,” Intl. Conf. on Acoustics, Speech and Signal Processing (ICASSP), 2017. [ VIDEO ]
- A. Dirafzoon, A. Bozkurt and E. Lobaton, “Geometric Learning and Topological Inference with Biobotic Networks,” IEEE Transactions on Signal and Information Processing over Networks,Volume PP, Issue 99, 2016.
- A. Dirafzoon, A. Bozkurt and E. Lobaton, ““A Framework for Mapping with Biobotic Insect Networks: From Local to Global Maps,” Robotics and Autonomous Systems Journal, Volume 88, pp.79-96, 2016. [ Video 1 | Video 2 ]
- T. Latif, M. Yang, E. Lobaton and A. Bozkurt, “Preliminary Statistical Assessment towards Characterization of Biobotic Control,” IEEE Engineering in Medicine and Biology Conference (EMBC), 2016.
- A. Bozkurt, E. Lobaton, and M. Sichitiu, “Biobotic Insect Sensor Networks for Search and Rescue,” The Journal of the Homeland Defense and Security Information Analysis Center (HDIAC), Volume 2, Issue 2, pp.29-33, June 2015.
- A. Dirafzoon, A. Bozkurt, and E. Lobaton, “Exploration and topological mapping with Hexbugs,” in Proc. 14th International Conference on Information Processing in Sensor Networks (IPSN), ACM, New York, NY, 2015, pp. 406–407.
- A. Dirafzoon, J. Betthauser, J. Schornick, and E. Lobaton, “Mapping of Unknown Environments using Minimal Sensing from a Stochastic Swarm,” in Proc. IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS 2014), Chicago, IL, 2014, pp. 3842–3849. [ VIDEO ]
- A. Bozkurt, E. Lobaton, M. Sichitiu, T. Hedrick, T. Latif, A. Dirafzoon, E. Whitmire, A. Verderber, J. Marin, and H. Xiong, “Biobotic Insect Swarm based Sensor Networks for Search and Rescue,” in Proc. SPIE Defense, Security, and Sensing, Baltimore, MD, 2014, pp. 90911L.
- A. Dirafzoon, J. Bethhauser, J. Schornick, J. Cole, A. Bozkurt, and E. Lobaton, “Cyborg-Insect Networks for Mapping of Unknown Environments,” in Proc. ACM/IEEE International Conference on Cyber-Physical Systems (ICCPS), Berlin, Germany, 2014, pp. 216–216.
- J. Betthauser, D. Benavides, J. Schornick, N. O’Hara, J. Patel, J. Cole, and E. Lobaton, “WolfBot: A Distributed Mobile Sensing Platform for Research and Education,” Zone-1 Conference of the American Society for Engineering Education, Bridgeport, CT, 2014, pp. 1-8. [ VIDEOS ]
- A. Dirafzoon and E. Lobaton, “Topological Mapping of Unknown Environments using an Unlocalized Robotic Swarm,” in Proc. IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Tokyo, Japan,2013, pp. 5545–5551. [ VIDEO ]
In the News
- October 23, 2018 – WRAL TechWire – IoT Demo Night Wonders
- November 18, 2016 – Seeker – Drones and Cyborg Roaches Team Up to Map Disaster Zones
- November 17, 2016 – TechXplore – Tech would use Drones and Insect Biobots to Map Disaster Areas
- July 22, 2015 – New Scientist – Cyborg Cockroach and Drone Teams can Locate Disaster Survivors
- December 13, 2013 – IEEE Spectrum – Cyborg Cockroaches to the Rescue
- October 18, 2013 – The Wall Street Journal – Send In the Cockroach Squad
- October 16, 2013 – Gigaom – Cyborg Insects could Map Collapsed Buildings for First Responders
- October 16, 2013 – NBC News – Don’t Panic! These Cyborg Roaches are Trained for Emergencies
- October 16, 2013 – NCSU News – Software Uses Cyborg Swarm to Map Unknown Environs