Wolfbots: A Swarm Robotic Platform [Archived in 2015]
The goal of this project is the design of an open-source platform for distributed sensing applications, which has an accessible interface and a flexible design. Some other specific features include low-cost, low-power consumption, high on-board processing capabilities, a suite of on-board sensors including a camera and microphone, and various communication channels. This work is partially funded by National Science Foundation under award CNS-1239243.
Visit the GitHub project at: https://github.com/ARoS-NCSU/
Media:
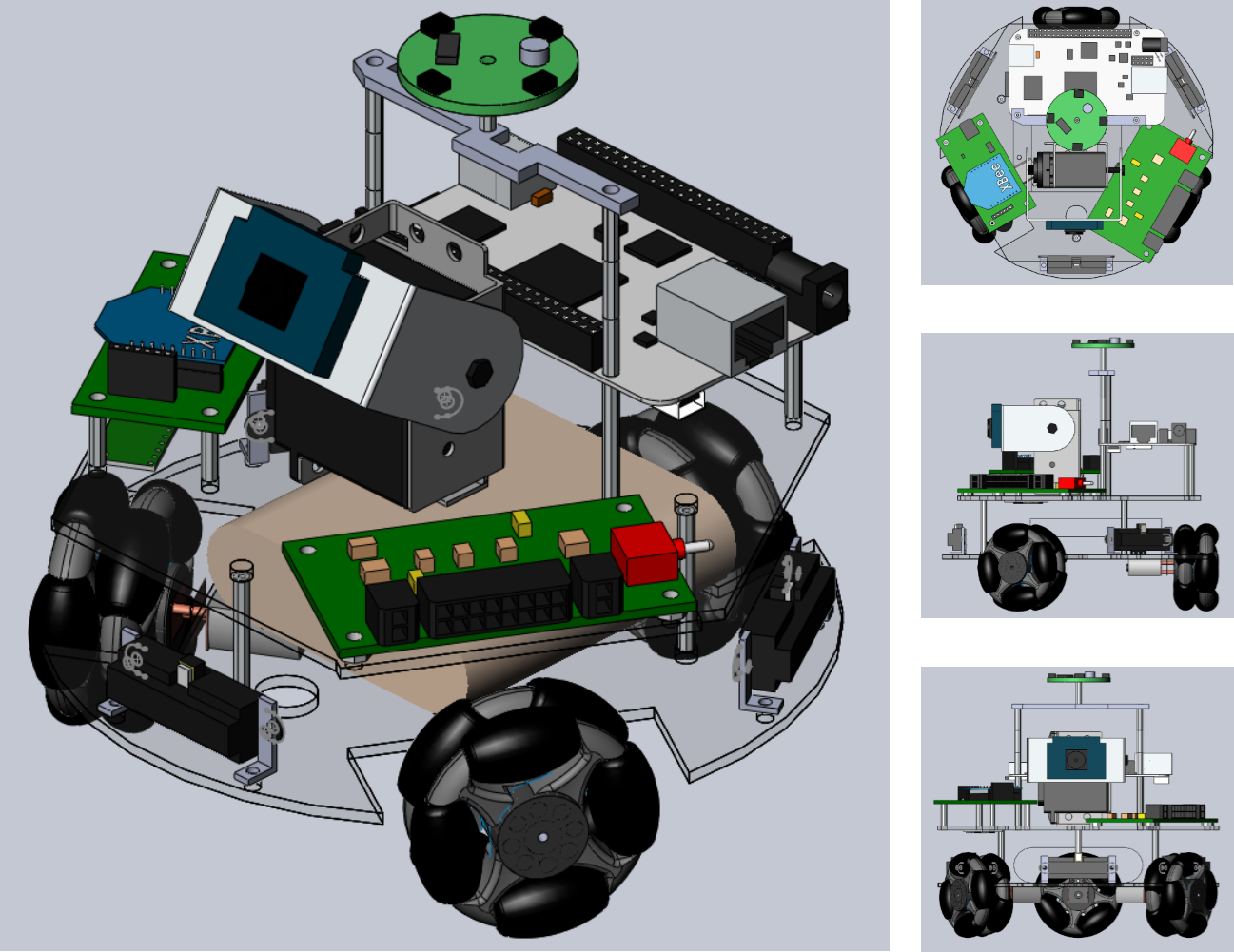
- 3D Assembly – 2014
- 3D View – 2014
Publications:
- A. Dirafzoon, J. Betthauser, J. Schornick, and E. Lobaton, “Mapping of Unknown Environments using Minimal Sensing from a Stochastic Swarm,” in Proc. IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS 2014), Chicago, IL, 2014, pp. 3842–3849.
- J. Betthauser, D. Benavides, J. Schornick, N. O’Hara, J. Patel, J. Cole, and E. Lobaton, “WolfBot: A Distributed Mobile Sensing Platform for Research and Education,” Zone-1 Conference of the American Society for Engineering Education, Bridgeport, CT, 2014, pp. 1-8.