CentMesh Drones - Overview
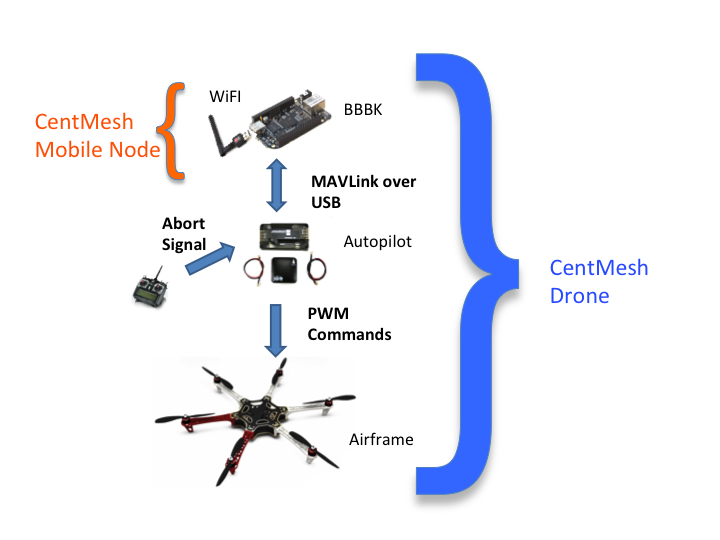
The CentMesh Mobile Node, mounted on and controlling a hexacopter, is what we refer to together as a "CentMesh Drone".
The CentMesh Mobile Nodes are designed to offer portability and mobility while allowing connectivity to the CentMesh fixed infrastructure (see HardWare/MobileNode). Briefly, these nodes can be mounted on a "vehicle" and control its motion using a standard interface. The vehicle can be anything capable of moving a node around, e.g., a student backpack, a bus, a car or a hexcopter. When the vehicle is a hexacopter, the logical decomposition of the resulting "drone" is as follows:
Each CentMesh drone is comprised of several modules interconnected through standard interfaces:
- The airframe module includes the frame, propellers, brushless motors, electronic speed controllers (ESCs), battery, as well as the 5V regulator that provides power to the autopilot and the sensor node. The airframe receives standard RC PWM control signals to the ESCs from the autopilot module.
- The autopilot module has the main role to stabilize the platform and to fly it at locations received from the sensor node. The autopilot requires an inertial measurement unit (IMU) typically hosting three axis accelerometers and gyroscopes, and a barometric sensor for stabilization. For navigation at the desired points it requires a GPS unit and a compass. A battery monitoring unit allows for failsafe landings on low battery. An abort signal (kill switch), sent in a separate frequency band (72MHz) allows for a forced landing or for a safe return to the launch point in case of major software failure on the sensor node. The commands from the sensor node are sent using the MAVLink format through an USB link.
- The mobile node is an embedded Linux board - we chose the Beaglebone Black, due to its relatively low cost, reliability, excellent software support and flexibility: with a host of exposed interfaces, A/D and D/A connections, the platform can be extended almost indefinitely. The main communication links with the ground stations and inter-drone communications are achieved using standard high power USB WiFi cards and TCP/IP protocols; in particular, MAVLink packets are well suited for transport over UDP packets.
Virtual environments can be created corresponding to CentMesh drones, for ease of programming. In such a case, the airframe is replaced with a physics simulation, the autopilot by a software version of the same autopilot, and the Mobile Node platform by a similar Linux platform with the same software. Details are available from the Drones/VirtualDroneEnvironment page.

Attachments (2)
-
droneArchitecture.pptx
(546.8 KB) -
added by rdutta 21 months ago.
Updated nomenclature
-
droneArchitecture.png
(96.8 KB) -
added by rdutta 21 months ago.
Updated nomenclature
{kind=link}
Download all attachments as: .zip