CentMesh Mobile Node Programming Guide
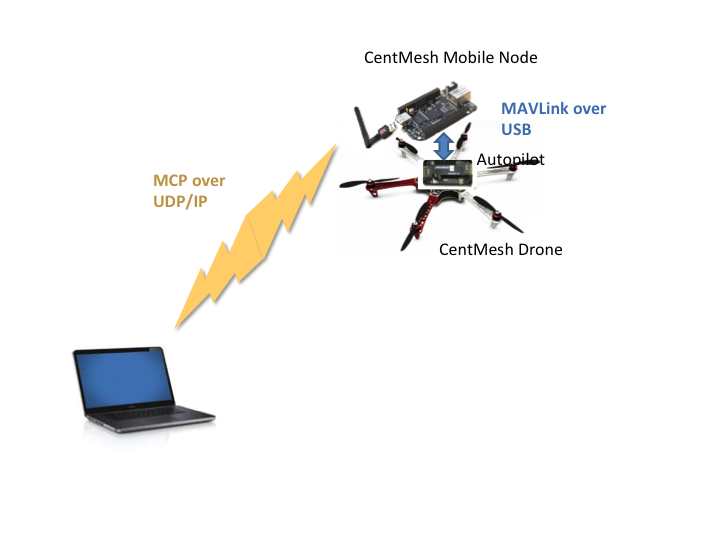
Applications can be programmed on the CentMesh Mobile Node (see HardWare/MobileNode), as on a standard Linux platform. To enable such applications to control the motion of the vehicle (such as the CentMesh Drone hexacopter), they must implement:
- The CentMesh Mission Control Protocol (MCP) - enabling the application to receive commands from a Mission Manager,
- The MAVLink protocol - enabling the application to issue control messages to the autopilot.

Notes for accomplishing these two tasks are provided below, and sample application code which shows how an application receives and interprets MCP messages, and generates MAVLink messages to drive the autopilot.
- Quick-start programming tutorial (new version 1.1 - now including alternate mavutil library usage)
- Source code for sample apps details
- Programming is easy to start on a virtual environment - see Drones/VirtualDroneEnvironment
- Other Programming Notes
- MAVLink protocol info details (see HardWare/Drones)
- Sending and receiving MAVLink messages details
- Follow the Leader APP details
Last modified 21 months ago
Last modified on Mar 19, 2014, 11:39:26 AM
Attachments (10)
-
dronesTutorial2014-1.pptx
(7.5 MB) -
added by rdutta 22 months ago.
February 2014 tutorial slides
-
Tutorial_drone_challenge.pdf
(17.6 MB) -
added by rdutta 22 months ago.
Quick-start programming tutorial v1.0
-
uav_auto_mode.py
(6.4 KB) -
added by rmarmav 21 months ago.
Source code for sample APP 1
-
uav_guided_mode.py
(7.6 KB) -
added by rmarmav 21 months ago.
Source file for sample APP 2
-
FTL_util.py
(4.4 KB) -
added by rmarmav 21 months ago.
Utility module for the sample applications
-
Tutorial_drone-with-mavutilusage.pdf
(17.8 MB) -
added by rdutta 21 months ago.
Quick-start programming tutorial v1.1
-
mcp_module_and_sample_code.zip
(15.1 KB) -
added by rmarmav 21 months ago.
MCP module and sample code
-
droneProgrammingArchitecture.png
(83.2 KB) -
added by rdutta 21 months ago.
Drone Programming Architecture
-
MCP_usage.pdf
(276.4 KB) -
added by rdutta 21 months ago.
Mission Control Protocol Details and Usage
- MCP_usage_v2.pdf (341.5 KB) - added by rmarmav 21 months ago.
{kind=link}